![]() MENU
MENU![]()
Traitement GPS
5. Devis : prix, poids,
taille
6. Schémas
7. Déroulement du lâché et du
vol
I. Présentation
du système GPS
a) Mise en situation
L’objectif de la partie GPS dans le ballon sonde est de permettre la localisation le ballon dans l’espace , c’est-à-dire situer et de suivre sa trajectoire grâce à ses coordonnées tels que la latitude, sa longitude, son altitude, sa vitesse, son cap. Ce système permettra d’effectuer des relevés de mesures à partir d’un récepteur au sol relié via un ordinateur muni d’un logiciel cartographique .
b) Diagramme Sagittal
b-1) Dans la nacelle :
b-2) Au sol :
![]()
II. Cahier des charges
a) Du ballon sonde :
-
Mesures enregistrées: le problème est la récupération
de la nacelle avec les informations (perte de la
nacelle, lieu d'atterrissage inconnu)
- Poids d'embarquement des systèmes < à
2.5Kg
- Émission des fréquences ( possibilité de
prêt de l’émetteur TOUCAN par L'ANSTJ sur fréquences
du CNES de 137.950MHz ).
- Relevés de :
mesure de température
mesure
de la pression
mesure de la vitesse de montée du ballon
mesure de positionnement et altitude du ballon
- Édition d’un message pour la
reconnaissance aérienne
- Prise vidéo
- Système
Émetteur / Récepteur de transmissions de données
b) De la
partie GPS
-
Modulation et Démodulation des données sur le
positionnement de la nacelle tels que l‘altitude, la
longitude et la latitude
-
Transmission sur 4800 bauds (compatible norme NMEA
0183)
-
Tension d ‘ alimentation stabilisée 5V
-
Précision des réceptions de données
-
Résistances des composants à la pression , la
température .
-
Poids le plus léger possible
-
Taille compacte
-
Interfaces PC au sol qui interviendra pour
l'enregistrement ou la visualisation des mesures en temps
réel
-
Alimentation extérieure
![]()
III. Étude
fonctionnelle
a) Schéma fonctionnel
· Dans
le Ballon :

· Au Sol :
b)
Étude fonctionnelle
FP1 :
module GPS
Permettre la
réception des données GPS envoyées par les satellites
- Entrée : Données GPS reçut
par l’antenne.
- Sortie : Signal GPS NMEA 0183
compatible RS-232
FP2 :
Mise en forme du signal
Permettre
de transformer le signal RS-232 en signal compatible TTL
- Entrée : Signal compatible RS-232
provenant du module GPS.
- Sotie : Signal
compatible TTL.
FP3 :
Modulateur FSK
Modem
permettant de faire interface entre le signal numérique
entrant et le signal modulé prêt à être
transmit par VHF.
- Entrée : Signal compatible TTL.
- Sortie : Signal codé FSK pour
être transmit par HF.
FP4 :
Alimentation stabilisée 5V ±5%
Permettre
de fournir une tension stable de +5V au GPS, au codeur
FSK, et au reste du circuits.
- Entrée : aucune
- Sortie : 5V régulé à ±5%
FP5 :
Démodulateur FSK
Modem
permettant de faire interface entre le signal modulé reçut
par HF et le signal numérique sortant au format
compatible TTL.
- Entrée : Signal FSK reçut par
HF
- Sortie : Signal compatible TTL
FP6 :
Convertisseur TTL / RS-232
Permettre la
compatibilité entre l’entrée du port série du PC
et du signal GPS.
- Entrée : Signal TTL
- Sortie : Signal RS-232
FP7 :
PC traitant les données par logiciel
Permettre l’exploitation
de la donnée GPS avec la cartographie de la région.
- Entrée : Signal RS-232
- Sortie : Données exploitées
par logiciels
FS1 :
Contrôle de la réception du signal GPS format FSK
Permet
de vérifier si on reçoit bien de signal FSK provenant
du récepteur VHF, à l’aide d’un voyant
lumineux.
FS2 :
Contrôle de la mise sous tension de la carte
Visualisation de contrôle .
![]()
IV. Choix des
composants
a) Module
FSK
Le signal du GPS est
numérique, il convient donc de le coder en FSK. Ce
module permet de faire du 4800 Bauds nécessaire
pour la compatibilité du récepteur.
b) Module G.P.S.
Le choix du module GPS a porté sur le GM-80 pour son prix d ’achat et une baisse de celui-ci pour l ’obtention du « pack » antenne + récepteur. Cependant le récepteur est limité en altitude à 18000 mètres comme tous les récepteur grand publique
c) RS232 et
TTL
Ø Dans
le ballon :
Utilisation d ’un transistor NPN pour effectuer le changement de niveaux, et également pour des obligations de consommation car un transistor bipolaire consomme moins qu ’ un circuit intégré.
Ø
Au sol :
Il n’excite
aucun problème de consommation puisque l ’on
dispose d ’une source de tension au sol dû le choix
du circuit MAX-232
![]()
| GM-80 + Antenne |
Infracom |
Pack GM80 |
1 |
198,03 € |
110 g |
||
| CMX469 |
RS |
378-3045 |
2 |
17,83 € |
7 g |
||
| Quartz 4MHz |
RS |
|
2 |
|
|
||
| Condensateur 1µF |
RS |
312-3184 |
1 |
0,96 € |
|
||
| Condensateur 0.1µF |
RS |
108-306 |
2 |
1,04 € |
|
||
| Condensateur 33 pF |
RS |
298-9337 |
1 |
0,92 € |
|
||
| Résistance 1MO |
RS |
393-2809 |
1 |
2,25 € |
|
||
| DB9 |
RS |
301-8329 |
1 |
4,41 € |
|
||
| Régulateur 5V±5% |
RS |
|
1 |
|
|
||
| Piles AA |
RS |
591-225 |
2 |
7,20 € |
25 g |
||
| |
225,44 € |
POIDS FINAL |
|
![]()
VI. Schémas
![]()
VII .
Déroulement du lâché et du vol
Nous avons validé tout
les montages, donc le modulateur GPS, on émettait et
recevait correctement les données entre le modulateur et
le démodulateur, de même pour l’émission vidéo.
Jour du lâché
De 8 heures à 10 heures,
briefing et préparation du lâché, c’est à dire récapitulation
chronologique du moment du lâché, installation du matériel,
initialisation du GPS par ordinateur.
A 10 heures, remplissage de l’enveloppe du ballon d’hélium,
mise sous tension de 10 secondes des montages (pour vérifier
le fonctionnement du matériel embarqué). Puis au moment
du lâcher de ballon , on allume les différents montages
qui resterons sous tension tout au long de l’expérience.
Cependant, nous avons eu des problèmes de dernière
minutes, c’est à dire que l’émission du GPS
ne fonctionnait plus, néanmoins nous avons gardé
la décision de lâcher le ballon, car la structure des bâtiments
proches brouillaient le signal sans pour cela nous inquiéter.
Puis une fois le signal rétablit, il s’est avéré
que des parasites étaient introduit dans la trame GPS,
et donc ce qui à rendu illisible la trajectoire en temps
réel. Par contre nous avons enregistré le signal modulé
sur cassette audio. Ce qui permet de traiter les données
en Septembre 2002, pour l’exploitation des résultats.
![]()
VIII .
Exploitation des résultats
Il y a plusieurs hypothèse
sur la dégradation de la trame :
Nous pensons que la dernière
hypothèse est la plus crédible, sans écarter la
possibilité que les deux autres se soient produites.
Nous avons donc procéder à un filtrage du signal reçu.
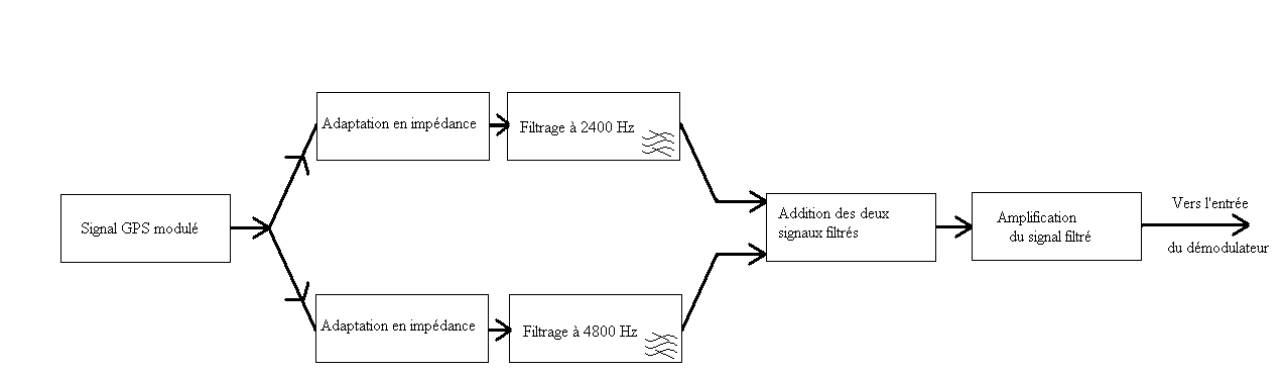
· Description des filtres
Le filtrage est réalisé par l’intermédiaire de deux filtres passe-bande du second ordre, l’un centré sur la fréquence de 4800Hz, et l’autre sur 2400Hz. L’addition des deux signaux permet d’obtenir la modulation FSK.
Or, l’acquisition du signal à l’entrée du démodulateur nécessite une amplitude minimum de 100Vrms. En remplaçant le GBF par le magnétophone, on s’est aperçu qu’une impédance complexe présente à l’entrée provoquait une ddp qui diminuait l’amplitude du signal. Il est donc nécessaire d’implanter préalablement aux entrées des suiveurs ,et, un montage additionneur (avec AOP) en sortie pour amplifier le signal filtré. ( schéma synoptique ci-dessous )
·
Schéma synoptique
·
Calcul des filtres passe-bande
Ø Schéma
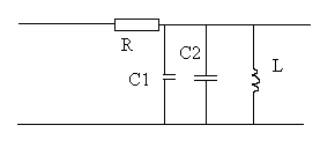
Ø Filtre
passe-bandes à 2,4 kHz
R= 1kW
C1= 1µF
C2=570 pF
L=2.63 mH
inductance d’essai n° 10
Ø Filtre
passe-bandes à 4.8kHz
R= 12W
C1= 362pF
C2=22 pF
L=2.63 mH inductance
d’essai n° 11
· Résultats du filtrage
Nous recouperons un signal net mais néanmoins inexploitable dû fait de la présence de parasite dont la provenance reste inconnue dans la trame GPS.
![]()
Équipe GPS ballon sonde AKMOSPH’AIR™