| |
  NAVIGATION NAVIGATION |
|
|
|
|
| |
LE PROJET |
|
|
|
|
| |
LA CONCEPTION |
|
|
|
|
| |
 EXPLOITATION EXPLOITATION |
|
|
|
|
| |
LES MEDIAS |
|
|
|
|
|
|
|
|
|
|
|
 |
|
| |
GPS-APRS |
|
|
|
|
| |
INFOS |
|
|
 Qu'est
ce que
le système
GPS
? Qu'est
ce que
le système
GPS
? |
|
|
|
La constellation
GPS est
formée
de 24 satellites
répartis
sur six
orbites
circulaires
équidistantes
inclinées
de 55°
sur le plan
équatorial,
sachant
qu' elles
sont espacées
de 60°
les unes
des autres.
Le nombre
de satellites
peut être
temporairement
supérieur,
de nouveaux
satellites
étant
régulièrement
lancés
pour remplacer
les plus
anciens
dont la
durée
de vie moyenne
est de 7,5
ans. Chaque
plan orbital
reçoit
4 satellites,
tous séparés
d'une même
distance
(environ
41700 km).
Les satellites
évoluent
à
une altitude
de 20183
km, ce qui
correspond
à
une période
de révolution
autour de
la Terre
de 11 heures
58 minutes.
Les satellites
ne sont
donc pas
géostationnaires
; leur vitesse
par rapport
à
la surface
de la Terre
est en effet
considérable
(environ
3,3 km/s).
Cette configuration
offre l'avantage
d'une couverture
à
tout instant
de la quasi
totalité
de la planète
; en effet
chaque récepteur
dispose
au moins
de 4 satellites
en vue,
c'est à
dire ayant
une élévation
supérieure
à
15°
par rapport
à
l'horizon,
95% du temps
sur une
moyenne
annuelle.
Les satellites
émettent
des ondes
radio délivrées
par quatre
horloges
atomiques
de haute
précision
sur une
fréquence
fondamentale
de 10,23
MHz. En
multipliant
cette fréquence
par 154
ou 120 on
élabore
deux fréquences
L1 et L2,
(respectivement
1575,42
MHz et 1227,60
MHz). L1
est modulée
par des
codes C/A
(Coarse
Acquisition,
acquisition
grossière)
(pour les
utilisateurs
civils)
et P (précis),
alors que
L2 est seulement
modulée
par les
codes P.
Les codes
P sont réservés
exclusivement
à
l'armée
américaine,
leur assurant
une plus
grande précision
que les
utilisateurs
civils car
ils sont
ainsi les
seuls à
pouvoir
exploiter
la fréquence
L2 en parallèle
avec L1.
Jusqu'au
1er mai
2000, le
DoD avait
mis en place
une sorte
de brouillage
afin de
réduire
la précision
pour les
utilisateurs
civils c'est
ce qu'on
a appelé
la disponibilité
sélective,
SA (Selective
Availability).
Ce brouillage
affectait
les codes
C/A en introduisant
des erreurs
qui se répercutaient
sur la précision
des mesures.
Avec la
fin de ce
système
de brouillage,
les utilisateurs
civils ont
eu accès
à
une meilleure
qualité
de service
en passant
d'une précision
horizontale
de 100 m,
à
seulement
30 m et
d'une précision
verticale
de 160 m
à
seulement
50 m, avec
les codes
C/A. Le
code P est
cependant
resté
à
la seule
disposition
de l'armée
américaine,
ainsi qu'aux
utilisateurs
autorisés
possédant
les algorithmes
de décryptage.
Chaque satellite
transmet
deux types
de message
: l'almanach
et les éphémérides.
L'almanach
consiste
en une information
générale
sur la localisation
et la santé
du satellite
dans la
constellation.
Un récepteur
GPS ayant
un almanach
à
jour, connaît
donc approximativement
sa première
position,
le jour
et l'heure,
connaît
donc les
lieux où
il doit
scruter
l'espace
pour rechercher
les satellites.
Les récepteurs
sont passifs,
ils ne font
donc que
recevoir
et analyser
le signal
émis
par le satellite,
ce qui fait
donc du
système
GPS un système
insaturable.
Il existe
plusieurs
types de
récepteurs
:
-le
récepteur
à
monocanal
multiplexé,
qui capte
les informations
satellites
après
satellites.
Ce système
est idéal
pour positionner
un objet
immobile
ou se déplaçant
à
très
faible vitesse.
Les mesures
effectuées
par ce type
de récepteur
sont relativement
lentes.
-le
récepteur
multi canal,
qui est
capable
de capter
simultanément
les signaux
en provenance
des différents
satellites.
Comme un
positionnement
nécessite
au moins
quatre satellites,
ce système
permet un
gain de
temps non
négligeable.
Ce type
de récepteur
est indispensable
pour les
appareils
se déplaçant
à
grande vitesse,
comme les
avions.
Plus tard
nous verrons
quelles
en sont
les raisons,
et pourquoi
est-il nécessaire
d'utiliser
4 satellites
pour réaliser
un positionnement. |
|
| Qu'est
ce que
le système
APRS
? |
|
|
|
| APRS™
est l'abréviation
de Automatic
Position
Reporting
System (système
de suivi
automatique
des positions),
qui a été
introduit
par Bob
BRUNINGA,
WB4APR,
lors de
la TAPR/ARRL
Digital
Communication
Conference
de 1992.
L'abréviation
APRS™
est un
logiciel
et une
marque
de commerce
déposée.
Fondamentalement,
l'APRS™
est un
protocole
de communication
packet
pour diffuser
des données
en direct
vers tous
les utilisateurs
du réseau,
et cela
en temps
réel
! Sa caractéristique
principale
est la
combinaison
du packet
radio
avec le
réseau
satellite
Global
Positioning
System
(GPS),
permettant
aux radioamateurs
de visualiser
automatiquement
les positions
des stations
radio
et de
divers
objets
sur des
cartes
apparaissant
sur le
PC. D'autres
possibilités
qui ne
sont pas
directement
reliées
au suivi
automatique
des positions
sont également
disponibles
tels que
les reports
météo,
la recherche
de balise
et les
messages.
L'APRS™
est différent
du packet
commun
sur plusieurs
aspects
:
- Il permet
la visualisation
de cartes
et d'autres
données
pour la
localisation
des véhicules
et des
personnes
et les
reports
météo
en temps
réel.
- Il accomplit
immédiatement
la mise
à
jour des
utilisateurs
grâce
à
une seule
trame
packet
!
- Il utilise
un répéteur
générique,
avec des
indicatifs
identiques
pour permettre
une standardisation
au niveau
mondial,
si bien
qu'il
n'est
pas nécessaire
de connaître
la classification
du réseau.
- Il permet
une répétition
intelligente
avec substitution
des indicatifs
pour réduire
l'encombrement
du réseau.
- En utilisant
les trames
Unproto
AX-25,
il supporte
les transmissions
bilatérales
des messages,
la distribution
des bulletins
et des
annonces,
conduisant
à
l'acheminement
rapide
des informations
sous forme
de texte.
- Il supporte
les communications
avec les
émetteurs
Kenwood
TH-D7
et TM-D700,
qui ont
été
conçu
avec un
TNC et
un microprogramme
APRS™.
Le
packet
radio
conventionnel
est seulement
utile
pour l'envoi
de message
volumineux
d'un point
à
un autre,
et est
traditionnellement
difficile
à
appliquer
aux évènements
en temps
réel
où
les informations
ont une
courte
durée
de vie.
L'APRS™
transforme
le packet
radio
en un
système
de visualisation
et de
communication
tactique
en temps
réel
pour les
urgences
et le
service
d'intérêt
général.
L'APRS™
permet
la liaison
universelle
de toutes
les stations,
mais évite
la complexité,
l'encombrement
et les
limites
d'un réseau
nécessitant
des connections.
Il permet
à
un grand
nombre
de stations
d'échanger
des données
tels que
des personnes
le feraient
dans une
réunion.
Toute
station
ayant
une information
à
apporter
l'envoie
simplement,
et tous
les utilisateurs
la recevront.
L'APRS™
permet
lors d'évènements
spéciaux
ou d'urgences
la localisation
en temps
réel
des principaux
intervenants.
Où
est le
leader
du marathon
? Où
sont les
véhicules
de secours
? Quel
temps
fait-il
en différents
lieux
de la
région
? Où
sont tombées
les lignes
électriques
? Où
est la
tête
du défilé
? Où
est le
véhicule
avec la
caméra
ATV ?
Où
est l'orage
? Où
est l'hôpital
le plus
proche
?
Pour
répondre
à
ces questions,
l'APRS™
apporte
un suivi
automatique
et complet
des positions
et statuts
des véhicules.
Il peut
être
utilisé
avec n'importe
quel système
radio
bilatéral
incluant
les radioamateurs,
les bandes
marine,
et les
téléphones
portables.
Il y a
même
un réseau
international
de localisation
APRS™
en direct
sur Internet.
|
|
|
| |
CONVERTISSEUR GPS > APRS |
|
|
| Equipe : Jérome. |
|
 Réalisation
d'un
convertisseur
de
signaux
GPS
en
trames
adaptées
à
l'APRS.
Réalisation
d'un
convertisseur
de
signaux
GPS
en
trames
adaptées
à
l'APRS.
|
Fonction
:
Le
système
GPS
est
un
système
de
positionnement
par
satellite.
Son
intérêt
était
de
nous
fournir
la
position
du
ballon
dans
l'espace,
c'est
à
dire
de
nous
permettre
de
suivre
sa
trajectoire
grâce
à
des
coordonnées
de
latitude,
de
longitude
et
d'altitude.
Caractéristiques
:
-Electriques
:
-
Tension
d'alimentation
de 5V
pour
le récepteur
GPS
et pour
le modem.
- Alimentation
extérieure
allant
de 6
à
9V d'où
la nécessité
d'un
régulateur
de tension.
- Faible
consommation
de courant
du fait
de l'utilisation
de piles.
- Récepteur
GPS
choisit
avec
une
sortie
TTL
compatible
avec
la norme
NMEA_0183
(transmission
des
données
sur
4800
bds).
- Modulation
du signal
en sortie
du modem
en FSK
à
1200
Bauds,
suivant
le protocole
AX-25.
- Nécessité
d'une
commande
d'émission
"
PTT
"
pour
indiquer
quand
le signal
au format
NMEA_0183
TTL
sur
4800
bds
est
envoyé
vers
l'émission
APRS.
-Physiques
:
Pression
: Pmax
: 0
HpA
Pmin
: 1000
HpA
(P ambiante)
Température
: -10°
à
60°C
Taux
d'humidité
de 90%.
-Mécaniques
:
-
Récepteur
GPS
séparé
de l'antenne.
- Poids
le plus
faible
possible.
- Taille
la plus
réduite
possible.
-Ergonomiques
:
- Réception
des
données
de positionnement
spatiale
de la
nacelle
(longitude,
latitude,
hauteur).
- Possibilité
de visualisation
des
données
en temps
réel
au sol.
-
Précision
la plus
importante
possible
des
données.
-Choix
techniques
:
Actuellement,
le système
GPS
(Global
Positionning
System)
est
le seul
système
de positionnement
par
satellite
en pleine
activité.
Il existe
cependant
un système
russe
similaire,
appelé
GLONASS,
mais
il ne
fonctionne
pas
encore
à
100%
de ses
capacités,
c'est
pourquoi
nous
utiliserons
le GPS.
|
|
|
|
|
Figure
1.
Le
récepteur
GPS
(vue
de
dessus)
|
Figure
2.
Le
récepteur
GPS
(vue
de
dessous)
|
Principe
de fonctionnement
:
FP1 : Module GPS.
Rôle
:
Recoit
les
données
provenant
des
satellites.
Entrée
:
Signal
GPS
reçut
par
l'antenne.
Sortie
:
Signal
TTL
sur
4800
Bauds
au
format
NMEA_0183.
FP2 : Conversion et Modulation.
Rôle
:
Convertir
le
signal
provenant
du
récepteur
GPS
en
un
signal
modulé
en
FSK
sur
1200
Bauds
au
format
AX-25.
Entrée
:
Signal
TTL
sur
4800
Bauds
au
format
NMEA_0183.
Sortie
:
Signal
codé
en
FSK
qui
sera
transmit
ensuite
par
VHF.
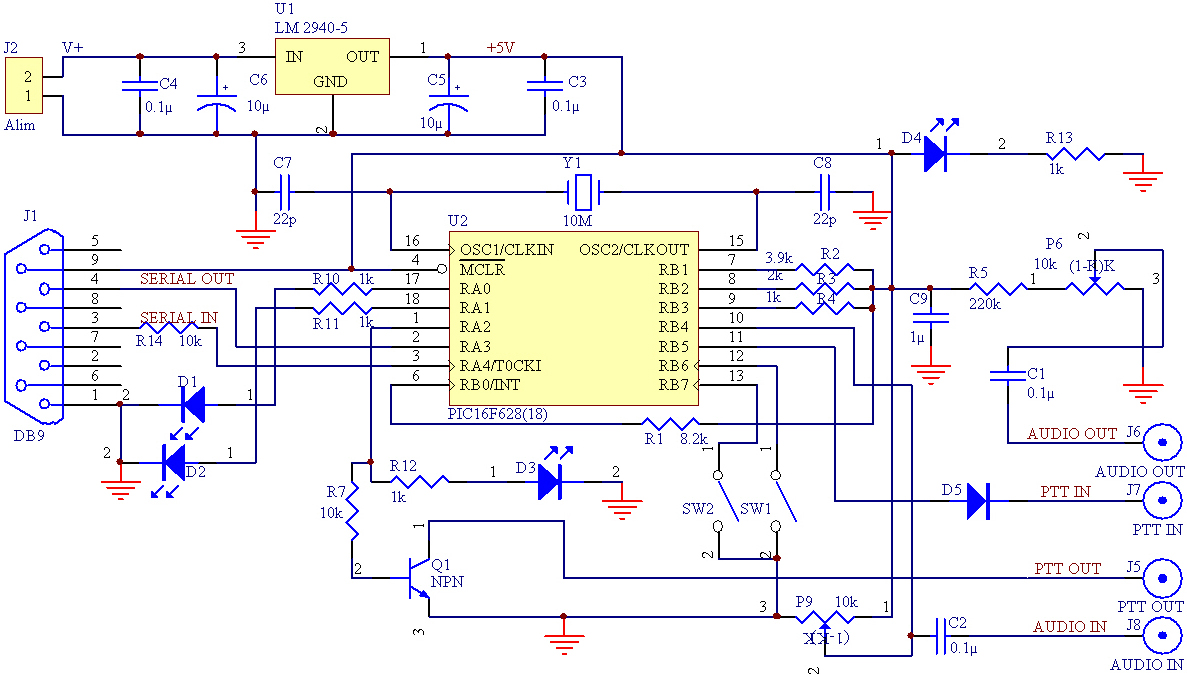
Etude
structurelle
:
|
|
|
Schéma
structurel
du
convertisseur
GPS
>
APRS
|
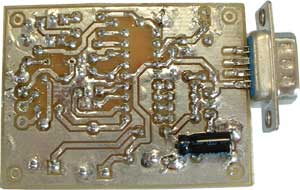
Photos
:
|
|
|
|
Figure
3.
La
carte
de
conversion
(vue
de
dessus)
|
Figure
4.
La
carte
de
conversion
(vue
de
dessous)
|
|
|
|
| |
EMETTEUR APRS 188,4 MHz |
|
|
Fonction
:
Le
système
APRS
a
pour
but
de
transmettre
des
coordonnées
de
positionnement
spatial
par
ondes
radio.
Son
intérêt
est
qu'il
permettait
a
quiconque
possédant
du
matériel
de
réception
de
trames
APRS
et
se
trouvant
dans
la
zone
de
réception
des
signaux
que
l'ont
émet
(il
est
possible
de
couvrir
une
très
grande
distance,
en
passant
par
un
réseau
de
répéteurs)
de
connaître
le
position
de
notre
ballon.
Cela
nous
a
permis
d'observer
ses
déplacements
depuis
des
ordinateurs
du
lycée,
mais
également,
une
équipe
mobile
a
suivi
le
ballon
en
voiture
de
manière
a
augmenter
nos
chances
de
le
récupérer
rapidement
(un
ordinateur
portable
avec
un
récepteur
APRS
mobile
ont
été
embarqués
dans
la
voiture
pour
qu'ils
puissent
le
suivre).
La
fréquence
réservée
en
France
pour
l'APRS
est
le
144.8
Mhz.
Caractéristiques
:
-Electriques
:
-
Alimentation
extérieure
obtenue
par
une
source
fixe
de 9V
continu
(piles).
- Limitation
de la
puissance
consommée
par
la carte
d'émission
APRS
à
5W.
- Modulation
du signal
FSK
par
une
boucle
à
verrouillage
de phase
(PLL).
- Impédance
de sortie
de l'émetteur
50 Ohms.
- Amplification
du signal
pour
pouvoir
obtenir
une
émission
convenable
(puissance
de sortie
de 24dBm
soit
250mW)
à
la fréquence
APRS
de 144.8Mhz.
- Emission
du signal
par
une
antenne
filaire.
-Physiques
:
Pression
: Pmax
: 0
HpA
Pmin
: 1000
HpA
(P ambiante)
Température
: -10°
à
60°C
Taux
d'humidité
de 90%.
-Mécaniques
:
-
Limitation
du poids
de la
carte
à
50g.
Principe
de fonctionnement
:
FP3 : Obtenir un signal modulé
Rôle
:
Modulé
le
signal
venant
du
modem
à
144.8
MHz
Entrée
:
Signal
venant
du
modem
APRS.
Sortie
:
Signal
modem
modulé.
FP4 : Amplificateur à deux étages.
Rôle
:
Amplifier
le
signal
modulé
de
la
PLL
à
250mW
Entrée
:
Signal
modulé,
non
amplifié.
Sortie
:
Signal
modulé,
amplifié
à
250m.
FP5 : Créer un signal d'horloge.
Rôle
:
Concevoir
un
signal
d'horloge
de
référence
pour
la
PLL.
Entrée
:
Alimentation
en
5v
commuté
Sortie
:
Signal
périodique
de
fréquence
10MHz.
FP6 : Commande d'émission.
Rôle
:
Commande
l'alimentation
des
fonctions
FP3,
FP4
et
FP5.
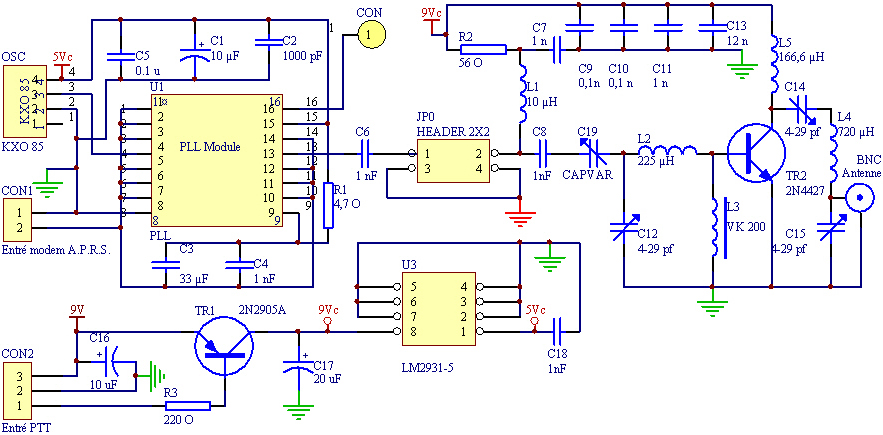
Etude
structurelle
:
|
|
|
Schéma
structurel
de
l'émetteur
APRS
|
|
| Chaîne
d'émission: |
Module PLL:
La
PLL
permet
de
générer
un
signal
modulé
en
fréquence
à
partir
d'un
signal
d'entrée.
Soit
en
entrée,
un
signal
modulé
en
FSK
sur
5V
et
en
sortie
un
signal
d'une
puissance
de
3dbm
modulé
sous
une
fréquence
de
144.8MHz.
La
PLL
à
besoin
d'une
fréquence
de
référence
à
10MHz
et
consomme
une
puissance
de
0.2625W.
-composants
périphériques
:
C3
et
C4:
permettent
de
filtrer
l'alimentation
en
5v
de
la
PLL,
R1:
permet
de
séparer
les
tensions
d'alimentations
analogiques
et
numériques. |
Oscillateur:(TCXO)
Génére
la
fréquence
de
référence
de
la
PLL
à
10MHz
en
l'alimentant
avec
5V
DC.
Consomme
une
puissance
de
:
0.01W.
-composants
périphériques
:
C5,C1,C2:
permettent
de
filtrer
l'alimentation
en
5v
DC. |
Le MAV 11:
1°
étage
d'amplification
Entrée:
signal
modulé
sous
3mW.
Sortie:
signal
modulé
et
amplifié
à
15.7dbm.
Puissance
consommée:
0.33W.
Alimentation:
9Volts
continue
commutée.
-composants
périphériques
:
C6:
Filtre
le
signal
d'entrée
à
144.8MHz,
C8,C19:
Filtre
le
signal
de
sortie
à
144.8MHz,
L1:
Laisse
passer
la
tention
9V
commutée
et
isole
du
signal
en
144.8
MHz,
C9,C10,C11:
Elimination
des
parasites
alternatifs,
R2,C7:
Filtre
passe
bas
permet
de
filtrer
l'alimentation. |
Le transistor 2N4427:
2°
etage
d'amplification
Entrée:
signal
modulé
sous
15.7
dbm.
Sortie:
signal
modulé
et
amplifié
à
27dbm.
Consomme
une
puissance
de
0.6W.
Alimentation:
9
Volts
continue
non
commutée.
-composants
périphériques
:
L2,C12:
Permet
d'ajuster
la
fréquence
du
signal
à
144.8Mhz
avant
de
l'amplifier
une
seconde
fois,
C13,L5:
Filtre
la
tension
d'alimentation
en
9V
DC
non
commuté,
C14:
Ajuste
le
seuil
de
fréquence
de
sortie
à
144.8
MHz. |
Sortie sur BNC:
Sortie
du
signal
vers
l'antenne.
-composants
périphériques
:
L4,C15:
Ajuste
la
fréquence
de
sortie
du
montage
à
144.8
MHz. |
| Alimentation: |
Le transistor 2N2905A
Transistor
de
commutation
PNP
permettant
de
piloter
le
9V
commuté
et
le
régulateur
LM2931-5.
Le
transistor
commute,
en
reliant
ou
non
sa
base
à
la
masse.
Consomme
une
puissance
de
0.3W.
-composants
périphériques
:
C16:
Filtre
la
tension
9V
DC
d'entrée
de
ligne,
C17:
Filtre
la
tension
de
sortie
(9V
DC
commuté),
R3:
Protége
le
transistor
en
limitant
le
courant. |
Le Régulateur LM2931-5:
Convertit
la
tension
9V
DC
commuté
en
5V
DC
commuté.
Consomme
une
puissance
de
0.4W.
-composants
périphériques
:
C18:
Filtre
la
tension
de
sortie
(5V
DC
commuté). |
| L'antenne
sera
faite
à
partir
d'une
tige
de
laiton
(Antenne
mono
brin
quart
d'onde)
reliée
au
montage
par
du
cable
coaxial
muni
d'une
fiche
BNC
femelle.
|
| Antenne:
|
L'antenne
sera
faite
à
partir
d'une
tige
de
laiton
(Antenne
mono
brin
quart
d'onde)
reliée
au
montage
par
du
cable
coaxial
muni
d'une
fiche
BNC
femelle.
|
|
|
Figure
5.
Antenne
quart
d'onde
de
l'emetteur
APRS
|
|
|
|
Figure
6.
ROS
de
l'antenne.
|
|
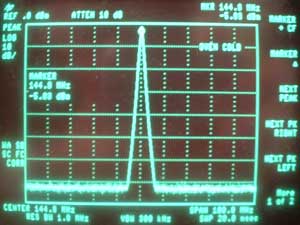
Photos
:
|
|
|
Figure
7.
Raie
de
L'émetteur
APRS
visualisée
sur
l'analyseur
de
spectre
|
|
|
|
|
Figure
8.
L'émetteur
APRS
(vue
de
dessus)
|
Figure
9.
L'émetteur
APRS
(vue
de
dessus)
|
|
|
|
| |
RECEPTION
APRS |
|
|
Fonction
:
Cette
partie
nous
permet
de
recevoir
les
signaux
modulés
et
de
les
convertir
pour
qu'ils
soient
traités
par
l'ordinateur.
Caractéristiques
:
-Electriques
:
-
Le module
de réception
APRS
doit
permettre
de recevoir
les
données
APRS
envoyées
par
le ballon
ou les
répéteurs
et de
les
convertir
en données
exploitables
afin
de connaître
la position
du ballon.
- L'ensemble
du module
de réception
APRS
doit
avoir
une
alimentation
autonome
pouvant
faire
fonctionner
le système
entier
durant
toute
la phase
de l'expérimentation
(du
lâché
à
l'atterrissage
du ballon),
soit
au moins
3 heures.
- Le
module
de réception
APRS
doit
pouvoir
être
transportable
facilement,
ses
dimensions
devront
être
évalués
afin
qu'il
prenne
le moins
de place
possible.
- La
connexion
du récepteur
à
un ordinateur
si cela
est
nécessaire
devra
se faire
sur
un port
RS232
et l'ordinateur
doit
être
du type
PC.
- L'émission
et la
réception
des
données
APRS
doivent
se faire
sur
la fréquence
de 144,800
MHz.
- Le
type
de modulation
utilisée
sera
de la
modulation
FSK
1200
bds.
-Le
protocole
de communication
sera
le protocole
UNPROTO
AX25.
-Physiques
:
Pression
: P
: ~
1000
HpA
(Pression
ambiante)
Température
: 10°
à
40°C
-Mécaniques
:
-
sans
contraintes
|
Principe
de fonctionnement
:
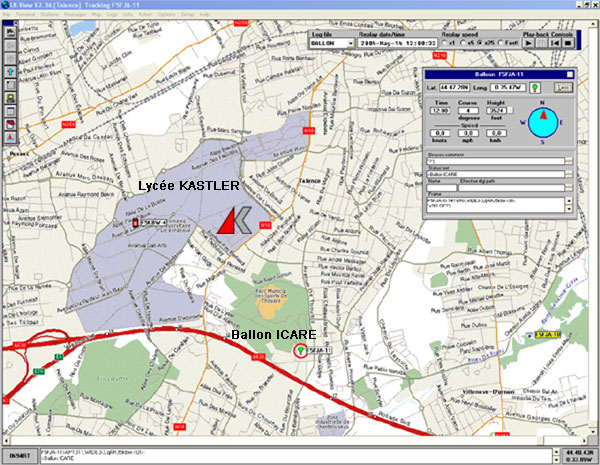
Le
Logiciel
UI-VIEW:
Photos
:
|
|
|
|
Figure
1.
La
station
de
réception
fixe
|
Figure
2.
La
station
de
réception
mobile
|
|
|
|
|
|
|
|
|
|